Ask An Engineer

Ask an Engineer is an MIT initiative to answer engineering’s most persistent questions, from the everyday to the highly complex.
-
#149
Do humans emit radiation?
-
#154
What are the future propulsion systems for interplanetary travel?
-
#153
Are Santa’s reindeer used for propulsion or navigation?
-
#152
How does an aircraft steer while taxiing on a runway?
-
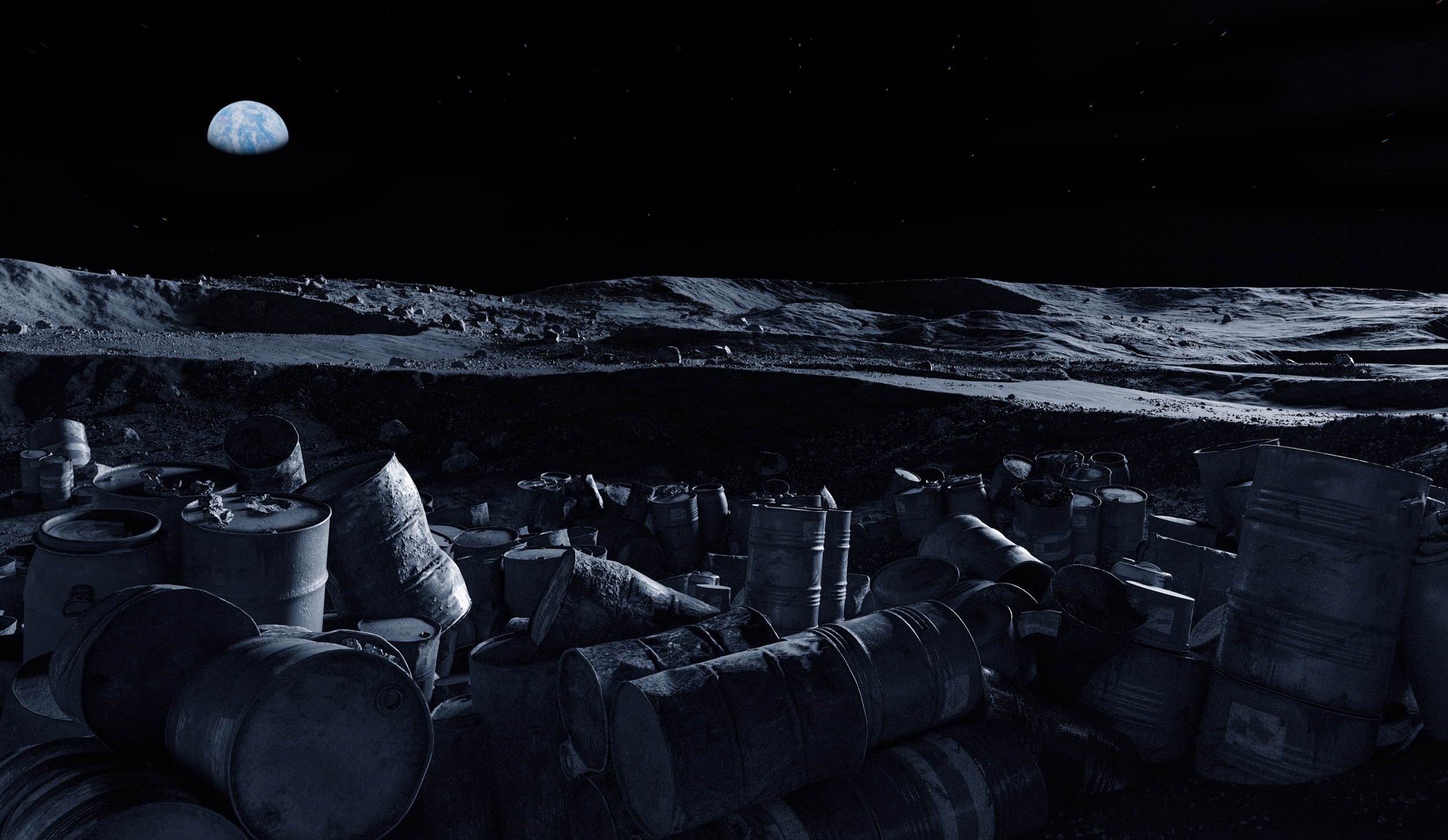
#150
Would it be feasible to dump nuclear waste on the Moon?
-
#148
How did life on Earth begin?
-
#147
How long would it take to charge an iPhone with my fidget spinner?
-
#146
Is it possible to make solar-powered airplanes?
-
#145
When will AI be smart enough to outsmart people?
-
#144
Will we ever run out of music?
-
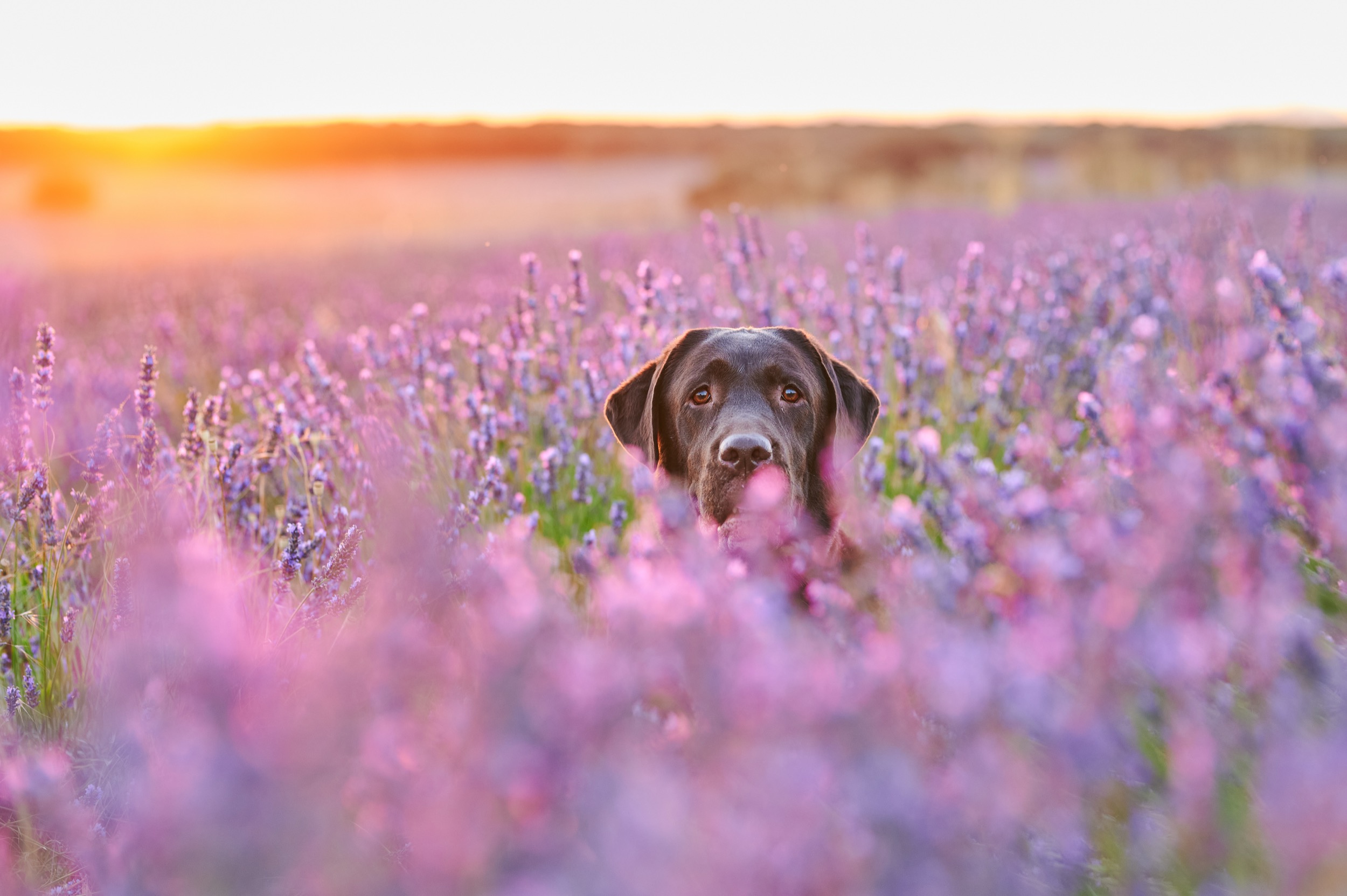
#143
Can we track the whereabouts of our dog using a passive microchip?
-
#142
Which engine is better at high altitude: diesel or gasoline?
-
#141
Why can’t cars run on water instead of gasoline?
-
#140
What is a short circuit?
-
#139
Would it be feasible to dump nuclear waste on the Moon?
-
#138
Is sleep necessary?
-
#137
Can we make robots that experience emotions?
-
#136
Is it possible to make a Batman suit?
-
#135
Why can’t fusion energy solve the global energy crisis?
-
#134
What’s the difference between premium-grade and regular gasoline?
-
#133
How can I tell if a certain tree is big enough to support a 30-foot zip line?
-
#132
Why do our bodies make boogers?
-
#131
Is there a way to harness electricity from lightning?
-
#130
How do birds sit on high-voltage power lines without getting electrocuted?